GIRAGANCI
CARATTERISTICHE PRINCIPALI
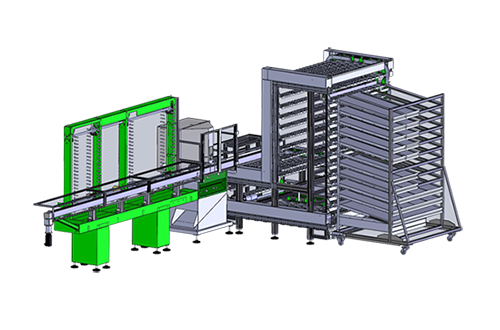
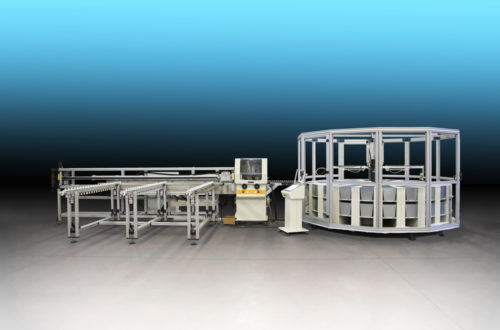
Giraganci è una macchina per il montaggio delle cornici per quadri, comprendente in totale n.5 stazioni di cui: una stazione di lavoro robotizzato adatta a fissare il pannello di fondo mediante la rotazione degli appositi ganci, due stazioni di lavoro manuale a monte, altre due stazioni di compensazione ed accumulo pezzi.
Zona di carico
La prima e la terza stazione, servono per operare manualmente e consistono in una serie di tapis roulants con il piano di lavoro inclinato di 30° per rendere ergonomica la postazione. Ogni tappeto è dotato di motore asincrono ed inverter per variare la velocità (Vel max 0,3 m/s). Per facilitare l’appoggio e lo scorrimento dei pezzi sulla superficie inclinata, il bordo inferiore presenta un piccolo nastro di circa 20 mm di altezza che si muove alla stessa velocità del tappeto principale.
Area di lavoro
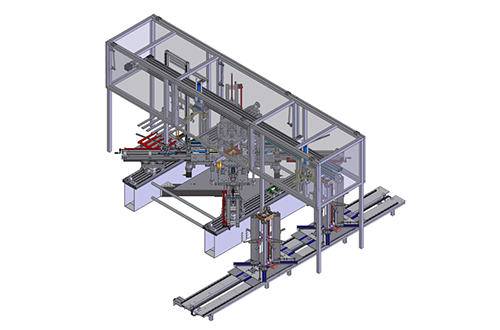
La stazione di lavoro automatica ha come base un tapis roulant di lunghezza 1450 mm, larghezza 800 mm, anch’esso dotato di motore asincrono, variatore di velocità con inverter (Vel max 0,3 m/s). A cavallo di questo tappeto si trova un robot cartesiano a 3 assi + 1 di rotazione della pinza che provvede a fissare i ganci nelle cornici. Asse x: corsa 1000 mm, motore Brushless 400W, vel. 1 m/s; asse y: corsa 800 mm, motore Brushless 100W, vel. 1 m/s; asse z: corsa 150 mm, motore Brushless 100W, vel. 0,25 m/s; asse r: (rotante) motore passo passo con encoder, vel 2500°/s
Il Sistema di visione
Un sistema di visione dotato di telecamera, sistema d’illuminazione, PC e monitor è in grado di localizzare le posizioni dei singoli ganci e fornire al robot le coordinate (x,y ed a, angolo di rotaz.) per guidarlo durante la lavorazione. Ogni gancio può avere un orientamento casuale e, come si può vedere dall’immagine elaborata, deve essere ruotato in un senso o nell’altro a seconda del lato del quadro in cui si trova. I quadri possono essere di varie dimensioni, di colori diversi, con cornici di diversi spessori, con una quantità di ganci variabile e, soprattutto, possono avere altezze diverse. Per conoscere quest’ultima variabile è stato necessario adottare un sensore che rilevi con precisione l’altezza del quadro sia per guidare l’asse z del robot sia per correggere i valori delle coordinate x e y che, essendo la telecamera fissa sopra l’area di lavoro, cambiano anch’essi in funzione dell’altezza del pezzo. La correzione e l’elaborazione delle coordinate avviene grazie ad uno speciale algoritmo sviluppato dai nostri tecnici. Inoltre, dal momento che i quadri sono di varie dimensioni, per evitare che la lettura del sensore di z venga falsata da un gancio o dalla cornice si è provveduto ad eseguire la misura al centro del quadro dopo che la telecamera ne ha determinato le dimensioni (croce verde in fig.2)
Il Sistema di illuminazione
Il sistema di illuminazione consiste in una serie di luci led posizionate attorno alla telecamera, in grado attenuare l’effetto prodotto dai ganci metallici che presentano una piega di circa 30° verso l’alto che può generare ombre o altri effetti indesiderati e di risaltare, per contro, il contorno dei particolari da rilevare. Inoltre, per evitare l’influenza di luci dall’esterno, tutta l’area di rilevamento è stata racchiusa in un involucro.
Una serie di rulli, con cuscinetti del tipo “ruota libera”, comandati da due assi elettrici provvedono alla guida ed il mantenimento del quadro durante la lavorazione adattandosi alla dimensioni dei quadri.
Zona di scarico
Il tappeto della stazione automatica si trova sul piano orizzontale, mentre quelli delle stazioni manuali si trovano a 30°, come interfaccia tra i due blocchi, è stato adottato un tappeto semovente, comandato da un pistone pneumatico. Una serie di fotocellule provvedono a regolare il flusso dei quadri sui 5 tapis roulants ed a fornire le informazioni al PLC.
Il pannello di controllo, comprende un PC con schermo da 17” Touch screen con relativo quadro elettrico, e permette di comandare e controllare la funzionalità della macchina:
- avviamento ed azzeramento assi
- controllo input/output
- controllo allarmi
- selezione quadri ed avviamento ciclo automatico
- controllo contatori e bypass stazioni
- controllo immagine rilevata da telecamera.
Particolare attenzione è stata dedicata alla sicurezza: la zona dove opera il robot non è accessibile durante il funzionamento perché è completamente racchiusa in un involucro apribile tramite due finestre controllate da finecorsa di sicurezza. Le altre parti in movimento, tappeti, motori, nastri e tappeto semovente, sono protette da carter fissi in lamiera o policarbonato da 3 mm.
Caratteristiche dei pezzi da lavorare:
- Dimensione dei quadri: min 100 x 130 mm , max 800 x 600 mm
- Spessore pannello: da 2 a 3 mm
- Altezza del pannello sul piano di lavoro: min 10 mm, max 45 mm
- Dimensioni e forma del gancio da ruotare: 16 x 55 mm spessore 0,3 mm con foro ø 4 a 8 mm dall’estremità arrotondata e piega di circa 30° a 14 mm, spessore dentino all’estremità opposta 1,5 mm., altezza max del dentino prima dell’inserimento mm 20 circa (vedi foto allegata). Trattamento superficiale: zincatura bianca
- Altezza e profondità cava di inserimento: 3,7 mm x 5 mm
- Posizione del gancio prima dell’inserimento: a circa 42 mm dal bordo del pannello e con un angolo compreso tra 0 e 180 ° rispetto alla cornice.

Funzionamento
Un operatore posa manualmente una cornice sul primo tapis roulant, esegue la lavorazione ed aziona il comando a pedale per il passaggio del pezzo alla stazione successiva.
Il trasferimento da una stazione all’altra avviene automaticamente, a condizione che la relativa operazione sia terminata (consenso dell’operatore con tasto o pedale elettrico) e che la stazione successiva sia libera.
La quarta stazione consiste in un tapis roulant semovente che consente il trasferimento del quadro dalla terza stazione inclinata a 30°, alla quinta che si trova in orizzontale.
La quinta stazione è completamente automatica: il quadro è portato dal tapis roulant contro una sbarra semovente e successivamente viene chiuso lateralmente da una rulliera spinta da due assi elettrici. Una volta che il quadro si trova in posizione, la telecamera effettua la ripresa ed invia le immagini al PC che determina prima il centro del quadro e poi le coordinate (x, y ed a) dei singoli ganci. Eseguita questa operazione, il robot si posiziona sopra il centro del quadro per permettere al sensore di effettuare la lettura della coordinata z, i dati sono elaborati dal PC che provvede poi a guidare il robot sopra il primo gancio, lo fa abbassare e ruotare per la chiusura del quadro, l’operazione è poi ripetuta in senso antiorario sui ganci a seguire. Una volta chiusi tutti i ganci, la sbarra di arresto si solleva, la rulliera laterale si apre, il tappeto provvede ad evacuare il quadro lavorato ed a riceverne uno nuovo.
Il progetto della parte meccanica, del quadro elettrico, il software del PC, del PLC e del sistema di visione, nonché la realizzazione dei particolari meccanici ed il loro montaggio è opera dei tecnici della ditta MAC.MO. srl ed in particolare di Paccagnella Tiziano, Pagiaro Mario, ing.Alberto Rosso.
Per ulteriori informazioni non esitare a contattarci!